
|
1 2 3 |
 /Архив новостей
Отзывы к статье |



| ОлесяВова писал(а): |
| Выводы:
1. Это ни разу не "просто" даже для взрослого, не говоря уже о "ребенках": 1.1. Сборка конструкций а-ля "автомат Калашникова", то бишь на скорость по сути возможна только для "типовых". Даже сейчас, попроси меня собрать заново - вряд ли справлюсь. А во время проектирования - так и совсем "труба" ... чтобы достичь этого состояния, каждый узел пересорибался раз по 15... 1.2. Трение в деталях. При пересборке узла, часто приходится доставать ось, на которой одето 3-5 деталек... так вот, сделать это БЕЗ спец. инструмента - не получится даже у взрослого "со всей дури", а уж про "ребенков" и говорить нечего. 1.3. Собственно Лего-соединения. Катастрофически не хватает деталек, определенного вида. А их нет "в природе" (обыскался по Сети, но их реально нет ни в каком Лего или его аналоге). Те что есть, существенно ограничены по применению, что практически исключает понятие "конструктор". То есть, собрать-то можно ... но не далеко не "всё" и не "всегда". В этой части, забавно ещё то, что много типо-размеров деталек, фактически дублирующих или объединяющих друг друга... "масло маслянное". |
это просто пока у Вас недостаток опыта
")
В лего как раз классно то, что конструкции можно собирать как простые, вполне доступные ребенку, так и весьма сложные, над которыми и взрослому есть о чем подумать.
Причем простые уже тоже вполне могут использоваться и как-то функционировать.
Что значит "типовые"? чем они отличаются с точки зрения именно времени сборки? детали те же, просто конструкцию кто-то уже придумал до нас.
Поищите видео роботов - участников основной категории WRO и робофутбола, их все ребята собирают менее чем за 2 часа, бывают весьма сложные конструкции, которые допустимый размер 25*25*25 заполняют практически полностью, а ведь младшая возрастная группа там - это 8-12 лет, т.е. им это точно по силам, причем без использования инструментов.
Даже если предположить, что с проектированием - конструированием помогли дома тренеры, то на территории сборки - отладки дети точно все делают сами.
Мы тоже все без инструментов собираем - разбираем, максимум - использование другой детальки или оси, чтобы подтолкнуть или зацепить.
| ОлесяВова писал(а): |
| Разработка этой конструкции по сути заняла все майские праздники, включая первые... |
это тоже пока недостаток опыта, вечером, если не забуду - выложу фото базы, которую сын под вдохновение за пару часов придумал и собрал, сразу скажу - я так не умею



Выводы:
1. Это ни разу не "просто" даже для взрослого, не говоря уже о "ребенках":
1.1. Сборка конструкций а-ля "автомат Калашникова", то бишь на скорость по сути возможна только для "типовых". Даже сейчас, попроси меня собрать заново - вряд ли справлюсь. А во время проектирования - так и совсем "труба" ... чтобы достичь этого состояния, каждый узел пересорибался раз по 15...
1.2. Трение в деталях. При пересборке узла, часто приходится доставать ось, на которой одето 3-5 деталек... так вот, сделать это БЕЗ спец. инструмента - не получится даже у взрослого "со всей дури", а уж про "ребенков" и говорить нечего.
1.3. Собственно Лего-соединения. Катастрофически не хватает деталек, определенного вида. А их нет "в природе" (обыскался по Сети, но их реально нет ни в каком Лего или его аналоге). Те что есть, существенно ограничены по применению, что практически исключает понятие "конструктор". То есть, собрать-то можно ... но не далеко не "всё" и не "всегда". В этой части, забавно ещё то, что много типо-размеров деталек, фактически дублирующих или объединяющих друг друга... "масло маслянное".
2.Трение в Лего деталях. Оно достаточно высокое. В этой конструкции, вся дурь 3 кГ*см. моторов по сути тратится именно на него.
3. Шестеренки и червяки. Последние - весьма низкого качеста (конструктивно, а не в исполнении), а посадить правильно шестеренки ... возможно только ограниченным количеством способов (межосевые расстояния) .. вот тут, нехватка базовых типоразмеров деталек - сказывается особенно сильно. Уже задумался насчет 3D-принтера и изготовления нужных деталек вручную.
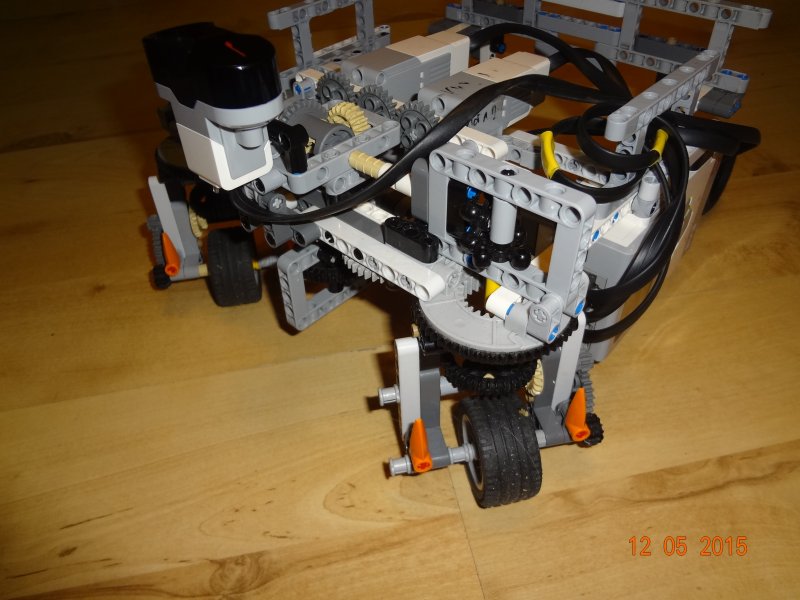
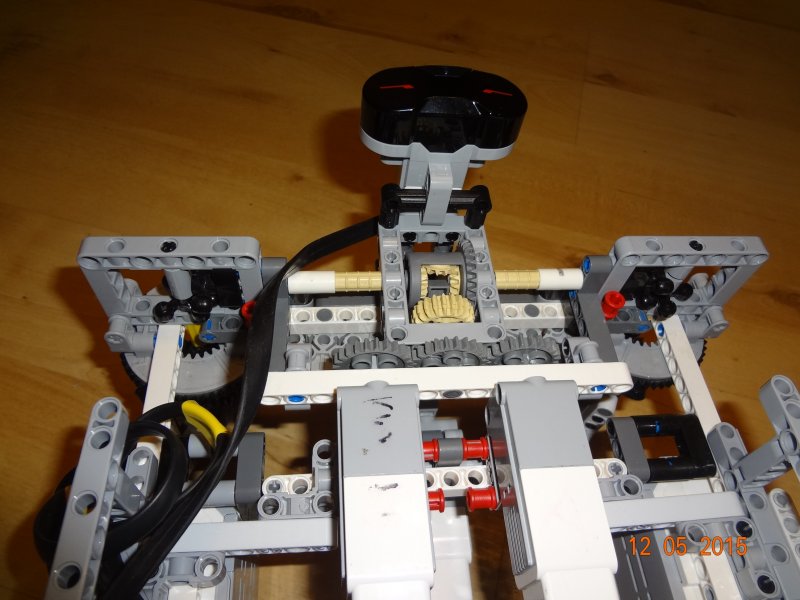
... на фото: стационарный тренировочный комплекс "рука робота" с пультом дистанционного (по проводкам) управления на 4 мотора.
нижний мотор вращает всю конструкцию в горизонтальном направлении. Поскольку есть перекос веса, то на желтый противовес хорошо ложатся типовые плоскогубцы для уравновешивания.
наверху 2 мотора: левый вращает карданную передачу на верхнюю часть руки (там пока крутится только желтая палочка с 4 дырками), а правый поднимает и опускает руку, через синий уголок (виден на фото).
4-й мотор планировался для крепления в основании руки, на её серых уголках ... но, поскольку "перекос веса" станет значительным и для правого мотора ... работы "приостановлены до решения проблемы".
Разработка этой конструкции по сути заняла все майские праздники, включая первые...
| ОлесяВова писал(а): |
| Судя по молчанию таковых нет, а жаль. |
наверное не тут искать надо...
здесь же в основном мамы, а из них редко кто двигатели сам собирает
кстати спасибо за инфу, с интересом почитала как вообще устроены линейные двигатели.
а если не секрет, то как планируете их в лего применить? что это будет?
использование электромагнитов в качестве линейного двигателя (без вращяющихся узлов от слова "совсем"). Примерно также, как они применяются в биполярных или поляризованных реле (есть такие). Но там, в реле, "ход" якоря совсем небольшой, а надо 4 или 8 мм (лего размер) ... что требует специальной формы якоря и достаточно нетривиальных расчетов "линейного двигла".
Вот таких - в продаже не нашел, а "мотать самим" - в целом не проблема. Там проблема в якоре электромагнита: это должен быть достаточно сильный постоянный магнит спец. формы.
| ОлесяВова писал(а): |
| Кстати, появился вопрос: кто-то делает "линейные" двигатели для Лего-роботов или подобных?
По сути, это полярный электромагнит с сердечником в виде постоянного магнита (биполярное реле)... вот где их можно нарыть в готовом виде или микро-постоянные магнитики сечением в районе 2.5 - 4мм? |
не знаю, ни от кого не слышала, чтобы сами мотали, хотя мысль конечно очень интересная...
это вы для общего образования или не продают движков, какие хочется или, несмотря на невысокие цены заказа с ebay, мотать самому все равно имеет экономический смысл?
С ардуино ведь и с готовыми двигателями полно мест куда голову и руки приложить... а если еще и двигатели мотать, то робот может не скоро поехать...
Мы с сыном сейчас небольшого гексапода собираем, купили на ebay штук 20 маленьких серв 9г по сто рублей штука и мечтаем, что робот скоро ходить начнет
. "поздно" - потому что решение уже принято, работа - идёт и соответственно "покупаться" теперь что-то будет ой как не скоро.
Добавлено спустя 2 минуты 58 секунд:
Кстати, появился вопрос: кто-то делает "линейные" двигатели для Лего-роботов или подобных?
По сути, это полярный электромагнит с сердечником в виде постоянного магнита (биполярное реле)... вот где их можно нарыть в готовом виде или микро-постоянные магнитики сечением в районе 2.5 - 4мм?
мальчик у Вас еще маленький, постепенно всякие конструкторы накопятся, они часто бывают призами на соревнованиях, мы так получили свой HunaRobo и небольшой набор Robotis .
У Robotis, кстати, прекрасные, небольшого размера, очень четкие и быстрые моторы Dynamixel, но они и отдельно не дешево стоят к сожалению...
Сборка заранее подготовленной конструкции робота как часть соревнования - это "фишка" основной категории и футбола роботов на WRO, ежегодной всемирной олимпиады роботов. Основная категория - это три возрастные группы, три регламента - очень небольшая часть в большом мире робототехники.
И даже в них сборка проводится только на Всероссийском и Мировом этапах, на региональных соревнованиях ребята приходят с уже собранными роботами.
Еще один вид соревнований, где сборка на месте - это соревнования с заранее не известной задачей, именуются "олимпиада" или "робот в мешке" или что-то еще подобное. Задание все участники узнают на месте, дается 3-4 часа на сборку и программирование робота, понятно, что туда не придешь с ардуинкой и паяльником, а вот конструкторы, в принципе, могут подойти любые.
Еще немного интересных ссылок, чтобы не казалось, что кроме сумо и траектории больше ничего нет:
| Код: |
| https://robofinist.org/competitions/types/ |
| Код: |
| http://www.railab.ru/season-2014.html |
| Код: |
| http://www.railab.ru/proekty.html |
Еще мне нравится подход на Евробот:
| Код: |
| http://www.eurobot-russia.ru/home |
Управляемые роботы недавно соревновались в Томске, проходили на время дистанцию с препятствиями и "буреломом".
Еще интересные, необычные регламенты придумывают в Красноярске на
| Код: |
| http://roboteh.pro/ |
У Красноярска пару лет назад были соревнования роботов в стиле зимних спортивных игр "Слалом", "Альпинизм", "Биатлон", "Боулинг" и "Маунтин-лифтинг" - что-то вроде восхождения на гору.
Это "длинная история" как я "разбирался" (медленно и с большими перерывами) какой вариант покупать или делать ребенку или с ребенком... просто тот регламент, что нашел, и 9в. по питанию сыграли роль "последней капли в море" недостатков именно Лего решений и конечно для нас. Кому-то будет с точностью наоборот .. это все очень индивидуально.
Регламент тогда нашел откуда-то из Мурманска (ссыль утеряна), в котором сборка Лего-робота входит в оценку и ... "на время". Мне тогда показалось, что важно собрать робота, решающего задачи соревнований "лучше других" (в т.ч. и "готового"), а не оценивать сборку "автомата Калашникова" вплоть до "шины сняты с дисков колес". Ну и ограниченность комплектации базового набора - тоже сильно ограничивает набор состязательных упражнений. Вы верно подметили, что в основном это покатушки по лабиринту (линии) и сумо. В основной категории тоже не намного "ширее".
Ну и 9в. - это напруга для профи-моторов (приборостроение), а ни разу не детских игрушек. Уж если и делать что-то на не стандартных 3-6в, то тогда выбирать более популярный "автомобильный" вариант в 12в. Там есть и компьютерное железо (стандартный выход по питанию) и автомобильное и достаточно мощное и профессиональное.
А 9в - "ни туда ни сюда"... нормальных мощных моторов на эту напругу как таковых не производят, блоки питания - тоже засада, аккумуляторы - таже проблема и т.д.. Вот это и есть "бяда". 9в - это по сути "переносные приемо-передатчики", работающие от "кроны". И только.
Кстати, Ардуино позволяет отделять питание выходных устройств от самого блока и управления. Что как раз и позволяет делать вполне серъезные бытовые автоматы вплоть до сетевого в 220в.
Насчет других серий, я с ними ещё знакомлюсь. Слишком поздно (заказ уже в пути) нашел инфу в достаточном количестве. Спасибо за ссылки.
Наверное, Вы уже разобрались, что в так называемой "свободной категории" на роботы могут быть из любых материалов и конструкторов, в том числе и ардуино.
Другое дело, что на соревнованиях в "свободной" обычно траектория, лабиринт, да мини-сумо, а хочется и чего-то нового
 .
.
Хотя, конечно, минимизация сумо почти безгранична, самые мелкие экземпляры "нано-сумо" имеют размер 2.5*2.5 см и собираются точно не из лего, но это и не для 9-тилетки задача.
Опять же в Новосибирске, насколько я знаю, проводятся только соревнования по мини-сумо обычных размеров лего-робота, т.е. 25*25*25 см и 1 кг весом.
В ардуино привлекает тот факт, что цена более-менее позволяет не разбирать робота сразу, а постепенно дорабатывать его, иногда отставляя на полку, чтобы потом снова достать и продолжить. Или собрать скажем систему полива растений или ухода за кошкой на время отсутствия и просто ее использовать.
С лего-роботами такую роскошь мало кто может себе позволить...
Похоже, что если работать с ардуино или ему подобными, то свободный доступ к 3D принтеру или хотя бы фрезерному станочку становится очень желателен, т.к. в отличие от лего, все детали для изготовления "тела" робота надо придумывать самостоятельно.
Но, с другой стороны, это дает свободу
.
У меня сложилось ощущение, что это просто разные области и совсем необязательно между ними выбирать и использовать только что-то одно, лучше бы "всего и побольше!".
Очень многие дети просто обожают лего, а когда оно начинает еще и двигаться, тем более двигаться осмысленно, то это просто море новых возможностей и новых эмоций! зачем отказываться?
Кроме лего сейчас довольно активно распространяется HunaRobo, здесь MY-Robot о нем писал(а). Есть VEX, Fischertechnik, Robotis, особенно популярны биолоиды Robotis, у них есть отдельная дисциплина "танцы роботов".
Можно посмотреть список робототехнических мероприятий и список популярных платформ на сайте Занимательная робототехника, у них там есть интересный "Каталог DIY-проектов роботов", например, Lego Mindstorms-экскаватор, Проект для магистерской диссертации в Гданьском политехническом университете (Польша), еще мне очень нравится посвященный робототехнике блог Александра Колотова
А подскажите, не поняла Ваш пост:
| ОлесяВова писал(а): |
| Ах какая засада, это ваш "лего майндшторм"! Посмотрел описания к типовым двигателям: практически всё рассчитано на напряжение 9вольт, а у нас все движки на 3-6вольт. Ну и посмотрел регламенты к соревнованиям ... бяда. В общем, решение получилось "само собой": берем Ардуино. Там по крайней мере можно организовать раздельное питание контроллера и периферии. А в майндшторм - пусть в школе играется. Нафиг, нафиг этот дурдом на колесиках... |
почему дурдом на колесиках и почему решение пришло именно после знакомства с регламентами?
Это "итого" что выдержало проверку детскими руками из собранного ранее:
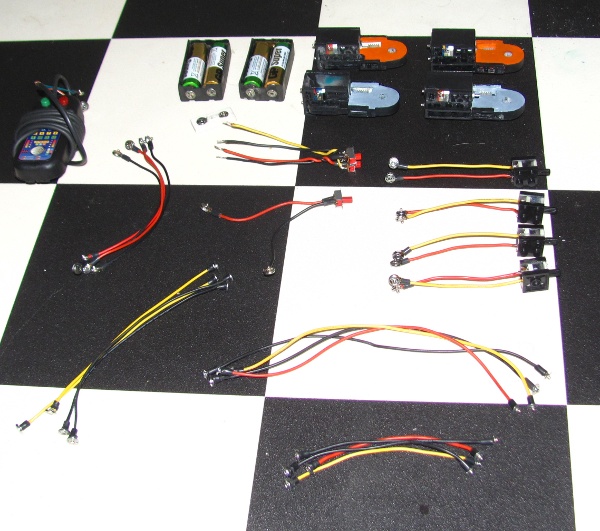
2 моторчика с редуктором на 81.8; 2 моторчика с редуктором на 120; 4 "датчика касания" (полноценные концевые выключатели с реверсом тока); пульт Д/У на 1 моторчик с парой батареек; 2 контейнера для батареек с соединительными проводами.
Но и этого, как оказалось ребенку пока достаточно и интересно. Вот уже второй день "бьемся" (на пару) как собрать "хватательную часть руки" роботу... моя фантазия сегодня похоже иссякла.
Задача: сделать "хваталку" с датчиком касания "в ладошке" (на фото справа 4шт: 2х2х1 лего кубик) на контроль усилия зажима захвата. Желательно, чтобы захват был устойчивым...

информация о Фестивале по ссылке в теме на сибмаме
http://forum.sibmama.ru/viewtopic.php?p=60270535#60270535
Вход бесплатный!!!
Мастер-классы планируется проводить с 11 до 16 часов 5 июня. Программа сейчас уточняется и будет выложена в начале мая.


Актуальные темы форумов
О чем бы еще поныть...))) Том 19 (Обо всем)Essential Parfums (Парфюмерные распивы)Книжный флешмоб. Том 9 (Культурная жизнь)Поллиноз (аллергия на пыльцу растений) - 6 (Аллергология, дерматология, иммунология)Salvador Dali Dalimix Gold (Парфюмерные распивы)СУНЦ - подразделение НГУ (бывшая ФМШ). Часть 2 (Школы и гимназии Новосибирска и НСО: отзывы о школах и учителях)Аромат дня -15 (Клуб любителей парфюма)Анапа 2024🐬 (Россия и страны ближнего зарубежья (СНГ))Читательский квест - 2024. Прием заявок закрыт. (Культурная жизнь)*** Iris Poudre Frederic Malle*** (Парфюмерные распивы)
Объявления
Егорьевские растюхи. Сезон 2023-2024 + Сумки Envirosax® (Коммерческие предложения)*СаДоВоД СТОП 12.05*⚡*Сима Ленд *⚡*НаТаЛи*⚡*HappyWear СТОП 29.04 (Коммерческие предложения)💃👗💝ОДЕВАЕМСЯ МОДНО ВМЕСТЕ С НАМИ! СтильнаЯ БелоруссиЯ! (Коммерческие предложения)ДИЗАЙНЕРСКАЯ БЕЛАРУСЬ (Коммерческие предложения)Модный дворик (Taobao, 1688 )+ 4Fresh (Барнаул. Коммерческие предложения и Зарубежные закупки)НаиЛучшая офисная одежда. Осень 2024 (Коммерческие предложения)Том2.Самая красивая одежда.💕РlayToday до -40% на лето. (Всё для детей - уход, развитие, развлечения и товары(КП))✌️🌞🤩ТАО-закупка от ШОЛПХЕЛПЕРА!💥 (Зарубежные покупки)Дачная. Все для сада и огорода. Саженцы Бийский, Любвит.питомник (Барнаул. Коммерческие предложения и Зарубежные закупки)Sisi,Omsa,Philippe Mati/Колготки/Белье/Трикотаж/ Детск-Взрос (Коммерческие предложения)
Увидели ошибку?
выделите фрагмент текста мышкой и нажмите "ctrl+enter"
ошибки в отзывах пользователей не исправляются
ошибки в отзывах пользователей не исправляются
© Copyright 2001-2024 Sibmama.ru
Использование материалов возможно только в интернете при наличии гиперссылки на сайт Sibmama.ru и с указанием авторства.
За содержание рекламных материалов ответственность несут рекламодатели.
Администрация не несет ответственности за сообщения, оставляемые посетителями сайта.
Помните, что по вопросам, касающимся здоровья, необходимо консультироваться с врачом.
Использование материалов возможно только в интернете при наличии гиперссылки на сайт Sibmama.ru и с указанием авторства.
За содержание рекламных материалов ответственность несут рекламодатели.
Администрация не несет ответственности за сообщения, оставляемые посетителями сайта.
Помните, что по вопросам, касающимся здоровья, необходимо консультироваться с врачом.